

고객센터

- 고객센터
- 자주 묻는 질문
첫째, 전동기에 인가되는 주파수가 달라지면 가장 큰 문제점은 전동기의 회전수가 달라지는 것입니다.
동일 전동기일 경우 인가 주파수와 회전수는 비례관계에 있다고 보시면 됩니다. 예를 들어 국내의 60Hz 전원에서 1800RPM인 전동기는 50Hz 에서는 1500RPM으로 회전하게 됩니다. 전동기를 수리하더라도 회전수는 바꿀 수 없습니다. 그러므로 우선 기계설비 업체와 회전수가 바뀔 경우 기계의 전반적인 문제점을 검토하여야 됩니다. 회전수변경이 문제가 될 경우는 전원으로 인버터를 사용하는 등의 검토가 필요합니다.
둘째, 출력은 축 회전력과 주파수의 곱에 비례하므로 출력이 같다면 출력 토오크는 주파수에 반비례하여 증가하게 됩니다.
셋째, 전동기의 냉각 Fan은 속도가 감소하면 풍량이 감소하게 됩니다. 즉 출력 토크는 증가하고 냉각능력은 감소하게 되어 전동기의 온도상승의 원인이 됩니다.
따라서, 60HZ 전동기를 50HZ로 장기간 사용하는 것은 바람직하지 못합니다.
전동기 출력에 대하여 정격전압을 선정할 때는 전동기 기능에 적합 여부와 전원, 배선 및 제어기등의 동력설비의 경제성도 함께 고려하여야 한다.
정격출력과 적정전압의 관계는 아래와 같다.
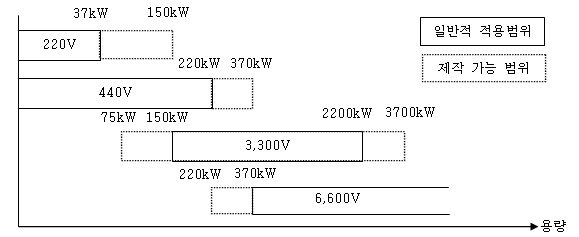
저압전동기를 동일 조건에서 사용하는 경우 220V와 440V 용 전동기의 가격 차이가 없으나 동일 출력의 경우 차단기, 개폐기 또는 전원의 통전전류가 1/2로 저감되므로 440V가 경제적이다
유도전동기의 기동계급은 출력 1kW 당 기동할 때 입력의 계급을 말하는 것이면 출력(kW)당의 입력(kVA)에 의하여 분류하고 아래 표의 기호로 나타낸다 [KS C 4205참조]
기동계급 | 1kW당의 입력(kVA) | 기동계급 | 1kW당의 입력(kVA) | ||
A | 4.2 미만 | L | 12.1 이상 | 13.4 미만 | |
B | 4.2 이상 | 4.8 미만 | M | 13.4 이상 | 15.0 미만 |
C | 4.8 이상 | 5.4 미만 | N | 15.0 이상 | 16.8 미만 |
D | 5.4 이상 | 6.0 미만 | P | 16.8 이상 | 18.8 미만 |
E | 6.0 이상 | 6.7 미만 | R | 18.8 이상 | 21.5 미만 |
F | 6.7 이상 | 7.5 미만 | S | 21.5 이상 | 24.1 미만 |
G | 7.5 이상 | 8.4 미만 | T | 24.1 이상 | 26.8 미만 |
H | 8.4 이상 | 9.5 미만 | U | 26.8 이상 | 30.0 미만 |
J | 9.5 이상 | 10.7 미만 | V | 30.0 이상 | |
K | 10.7 이상 | 12.1 미만 | |||
1kW당의 입력(kVA)= {기동전류(A) X 전압(V) X (3)^0.5 }/ {정격출력(kW) X 1000 }
*참고: 윗 식에서 (3)^0.5 는 제곱근 3 을 나타냄.
(예) 7.5kW 4P 380V 기동전류 109.2(A) 인 경우
1kW 당의 입력(kVA) = {109.2 X 380 X (3)^0.5} / (7.5X1000) =9.583
상기 값은 9.5 이상 10.7 미만이므로 기동계급은 J 임.
개요: 전동기는 전기적으로 토크를 발생시키는 전기기계이며, 이 토크를 발생시키기 위해서는 두 개의 독립된 제어값을 필요로 하는데, 하나는 자속성분이며 다른 하나는 토크 성분이다.
전동기 발생 토크는 이 두 성분의 벡트적(vector product)로 나타난다. 따라서 정밀 토크 제어를 구현하기 위해서는 자속의 방향과 크기를 동시에 알고 있거나 제어 할 수 있어야 한다.
아래는 인버터 별 차이를 나타내는 표이다.
(하기 자료 무단복제 및 배포를 법적으로 금합니다. 또한 하기 자료로 인한 어떠한 손실도 당사에 책임이 없음을 밝힘)
자속성분 | VVVF | Vector | ||
범용 | 고정도 | Sensorless | Servo용 | |
V/F비로서 자속크기만 결정 (V:입력전압, F:입력 주파수) | 자속의 방향과 크기를 연산 (직접제어와 간접제어법이 있음) | |||
토크성분 | Slip 주파수차에 의해 전동기 내부에서 임의적으로 결정되어지며 외부제어불가능 (Slip주파수:입력주파수와 회전속도간의 차) | 자속방향에 수직으로 토크전류 | ||
제어방법 | open loop 제어 | closed loop 제어 | closed loop 제어 | |
토크제어 | 불가능 | 가능 | ||
속도제어범위 | 1:50 | 1:100~500 | 1:100~500 | 1:500 이상 |
효율 | 저속시 나쁨 | 저속시 나쁨(저속시 약계자를 적용하므로 효율개선가능) | 저속시 나쁨 | |
속도범위 | 약계자 제어불가능 | 약계자제어가능(고속운전실현) | ||
주된적용범위 | fan,blower,pump 등 | 일반공정 (vector 제어가 널리 활용 됨으로 인해 용도가 축소되고 있음) | 제지,필름,철강공정 등 | 반송기 등 |
Power Rate(kw/sec) | 10 이하 | 20 | 100 | |
자속성분 | Servo |
영구자석에서 일정크기의 자속이 생성되어지며, 방향은 위치 검출기로부터 얻어짐 | |
토크성분 | 자속방향에 수직으로 토크 전류제어 |
제어방법 | closed loop제어 |
토크제어 | 가능 |
속도제어범위 | 1:1000~5000 |
효율 | 효율이 가장 좋음 |
속도범위 | 약계자제어불가능 |
주된적용범위 | NC,Robot,반송기등 |
Power Rate(kw/sec) | 70 |
* 당사에서는 Servo 용 전동기는 현재 생산하지 않고 있사오니 참조 하시기 바랍니다.
Ex Q.
1. 440V 모타가 500V에서 운전이 될 경우 모타에는 어떤 문제점이 일어날 수 있는지요..? (+,- 10% 범위를 벗어나서의 운전)
2. 아울러 440V 모타가 380V로 낮은 전압에서 운전이 될 경우 어떤 문제점이 생길 수 있는지 궁금합니다...
3. 그리고 상과 상사이의 전압이 (445V, 495V, 476V) 차이가 날 경우도 모타에는 어떤 문제점이 일어날 수 있는지 궁금합니다..
A.
>1. 제목과 같이 440V 모타가 500V에서 운전이 될 경우 모타에는 어떤 문제점이 일어날 수 있는지요..? (+,- 10% 범위를 벗어나서의 운전)
- 정격전압 이상에서 운전될 경우 전동기 철심에 전압에 비례하는 자속이 유기되고 자속포화 현상이 나타납니다. 이것에 의해 과도한 자화전류(무효분 전류) 가 흐르게 되며 역률 저하로 특성이 나빠지고 온도상승, 과열의 원인이 됩니다.
>2. 아울러 440V 모타가 380V로 낮은 전압에서 운전이 될 경우 어떤 문제점이 생길 수 있는지 궁금합니다...
- 낮은 전압일 경우 전동기의 발생 총자속이 전압에 비례하여 낮아지고 기동회전력, 최대회전력은 전압의 제곱비로 낮아 집니다. 운전시 전동기의 슬립이 높아지고(회전속도 저하) 심할경우 기동을 못할 수도 있음, 운전되더라도 과열의 원인이 될 수 있습니다.
>3. 그리고 상과 상사이의 전압이 (445V, 495V, 476V) 차이가 날 경우도 모타에는 어떤 문제점이 일어날 수 있는지 궁금합니다.
.
- 이 경우는 각 상전압 평균값인 472V의 정상 전압과 전압불평형 분의 역상전압 -25V 이 전동기의 인가된 것으로 해석할 수 있습니다. 전압불평형율은 5% 정도이지만 이것의 수배에 달하는 전류 불평형이 발생하며 손실 증가에 의한 온도상승 과도 , 슬립증대 등 전동기 운전에 좋지 않은 영향을 줄 수 있습니다.
******************** <참고> 관련질문 **************************
Ex Q.
전동기사양은 3x460V, 0.75Kw, 고효율모터 입니다.(교반기용)
이 전동기를 현장전원 480V에 사용해도 문제가 없는지, 만약 어떠한 문제도 없다면 이를 증명 할 수 있는 근거나 자료를 요청합니다.
A.
사용전압의 변화와 관련된 내용이 KS C 4202의 5.8에 수록이 되어 있습니다. 간략하게나마 소개를 드린다면 "정격전압의 ±10%의 변화가 있어도 정격부하에서 실용상 지장이 없어야 한다 " 라는 문구가 있으며 "실용상 지장이 없다는 것은 수명이 현저히 단축될 정도는 아니며 특성및 온도상승등은 반드시 정격상태의 규정값에는 따르지 않아도 좋다"라고 되어 있습니다.
당사에서 제작한 전동기는 KS규격과 적합하게 제작을 하여 사용상 지장은 없습니다만 조건이 정격전압에서 사용하면서 전압의 변동 폭이 위에서 언급한 조건의 범위일 경우에서 입니다. 따라서 460V용 전동기를 480V로 계속 사용하는 것은 전동기의 특성이 정격상태의 규정조건에 만족할 수 없다는 것입니다.
고객님께서 문의하신 전동기의 리드선 표기방법과 관련된 내용은 전동기와 전원측으로 구분을 합니다.
어떤 의미있는 뜻을 갖는 문자라기 보다는 서로 약속한 문자입니다.
전원측에는 R,S,T로 표기를 하고 전동기의 리드선측은 U,V,W로 표기하여 순서대로 결선시에
전동기 제조사측에서 제시하는 회전방향으로 회전되게 만들어 진 것입니다.
(참고로 당사의 회전방향은 부하측에서 볼때 반시계 방향으로 회전하게 되어있습니다)
>안녕하십니까?
>모터(펌프용) 입력전원 측정시 궁금한 사항이 있어서 문의드립니다.
>모터정격- 440V, 45kW
>측정치 - 전압 V12 = 440.4V, V23 = 443.6, V31= 443.6
> 전류 A1 = 53.9A. A2 = 59.9A, A3 = 52.6A
>
>위와 같이 A2(S상) 전류가 다른 상에 크면 커도 모터수명이나 전동기 효율에 어떤 문제를 발생시키는지요?
>(또 이런 현상이 발생하는 원인은 무엇인지요?)
>고객의 소리에 많은 관심을 보여주시는 귀사의 노고에 감사드립니다.
A.
저희 홈페이지를 찾아주신데 감사 드립니다.
먼저 사용 전압에 대한 전동기관련 KS규격의 내용을 말씀드리면 (KS C 4202) "사용전압의 변화는 정격전압의 ±10%의 변화가 있어도 정격부하에서 사용상 지장이 없어야한다"라고 되어 있으며, 전류와 관련해서는 무부하 전류를 규정하고 있습니다. "각상의 무부하 전류와 그 평균값의 차는 평균값의 ±5%를 초과해서는 안된다"라고 되어 있습니다. 무부하 전류가 상기 기준값을 벗아나는 경우에는 전동기에 이상이 있다고 판단을 하고 있습니다
님께서 문의하신 내용은 부하(펌프)운전시 전류를 말씀하신건데 위의 규격의 내용과는 차이가 있어 전동기의 이상유무 판단의 기준으로 삼기는 곤란하구요 전동기에 흐르는 전류의 불평형률은 지금 3.4~8%의 변화를 보이고 있습니다. 이는 각상에 흐르는 전류로 내부에서 자속이 발생하여 이것이 회전자를 회전시키는 힘으로 변화를 하게되는데 이러한 전류가 불평형하게 흐른다는 것은 회전시 각 상에 발생하는 회전토오크가 불균형하게되어 진동과 효율 저하등의 원인이 됩니다. 이런 원인이 전동기 수명에 얼마만큼의 영향을 줄지는 정확히 판단은 되지는 않습니다만 평형한 전류와 정전압의 조건보다는 줄어든다고 볼수 있습니다.
이러한 현상이 발생하는 원인들이라고 한다면 주요원인이 전력계통내에서 삼상전원에서 단상부하를 인출해서 사용하는 중 단상부하를 각상에 골고루 배치가 안되고 편향되어 있는 원인이 있을 수 있습니다.
부하전류의 맥동은 한마디로 부하에 대한 전동기 용량의 부족에서 나오는 현상이라고 말할 수 있습니다.
이런 현상은 주로 인버터 구동시 많이 나타나는데, 인버터의 전압과 주파수를 선형적(linear)으로 setting 해야 하나, 이 경우에는 전압이 주파수의 제곱에 비례되게 설정하여 전원 주파수의 저하에 따라 전압은 더욱 떨어지고, 이로 인해 전동기의 출력 토크가 작아져 발생하는 현상입니다.
전동기에 인버터를 설치 하였을 경우 다음과 같은 이점이 있다.
1. 기설치된 정속도형 유도 전동기를 속도제어 할 수 있다.
- 농형 Motor의 단자전압과 주파수를 바꾸면 회전수가 변한다.
2. Soft Stop을 할 수 있다.
- 초저속 시동(0.5Hz)은 물론 가감속 시간을 임의로 설정 할 수 있다.
3. Start, Stop을 고빈도로 할 수 있다.
- 상용전원의 경우와 같은 큰 시동전류를 흘리지 않고 작은 전류에서 급·가감속이 원활하기 때문에 전동기의 발열이 적다.
4. 주회로 Contactor없이 정회전, 역회전 운전이 가능하다.
- 반도체(트랜지스터)에 의한 상회전 절환 때문에 종래의 Contactor와 같은 마모 부분이 없고, 게다가 확실한 인터록 운전을 할 수 있다.
5. 전기 브레이크를 걸 수 있다.
- 가감속은 기계에너지를 인버터 내에서 전기 에너지로 변환하여 흡수하기 때문에 자동적으로 모터는 제동력을 낸다.
영속도 부근에 이르면 직류전류를 모터로 흘려 직류제동이(DB)이 되어 확실하게 멈출 수 있다.
6. 환경이 나쁜 장소의 Motor를 속도제어 할 수 있다.
- 농형 Motor를 사용 할 수 있기 때문에 방폭형, 방수형, 옥외형 또는 특수형상으로 만들기 쉽다.
7. 고속 회전이 가능하다.
- 정격주파수의 130% 까지 높일 수 있다.
8. Motor 사용시의 전원 용량이 작아서 좋다.
- 상용전원 시동처럼 큰 전류(5~6배)는 흐르지 않는다. 저주파 시동으로 겨우 100~150% 전류가 된다.
9. 전원 역률은 어떠한 운전에서도 90% 이상이다.
- 교류를 삼상 전파정류에 의해 직류로 변환하므로 전류의 상지연이 없다.
10. 에너지절약/환경보호
- 펌프, 팬, 블로워 등과 같은 부하 조건에 따라 회전수를 적절하게 가변속 제어 하게 되면 전원 입력량을 조절 할 수 있어 동력절감 효과를 가져 올 수 있다.
※ 이상과 같은 장점과 더불어 적용 및 사용상에 있어서 유의해야 할 점이 있음을 적용 및 사용 시에 고려하셔야 합니다.
권선온도 보호장치에는 THERMOSTAT(THERMOCOUPLE), THERMISTOR, R.T.D(Resistanec Temperature Detector) 등이 있으며 이것들을 총칭해서 THERMOGUARD라 한다.
1. 기종별 원리 및 사용법
(1) THERMOSTAT
Bimetal의 원리를 이용하여 권선의 온도가 일정한 값 이상일때 회로가 열리게 하는 부품임.3상에서 서로 직결로 연결한다.
(2) THERMISTOR
권선의 온도가 상승함에 따라 소자의 저항변화가 거의 없으나 일정한 값 이상에서는 저항의 값 변화가 급격히 증가(P.T.C),
또는 감소(N.T.C)하는 특성을 갖고 있다. 이러한 THERMISTOR는 통상 Relay Unit에 의하여 주회로를 차단하는데 쓰인다.
(3) R.T.D (Resistanec Temperature Detector)
권선의 온도 변화에 따라 소자(일반적으로 백금선을 이용)의 저항이 비례적으로 증감되는 특성을 갖고 있다. 이러한 특성을
이용하여 즉 일정한 전압을 소자에 가한 경우 권선 온도의 상승에 따라 저항 증가로 인하여 전류가 감소하게 된다.
이러한 전류의 감소는 Setting 값 이하에서는 Relay의 Holding을 상실하므로 이 순간 주 회로의 통제가 가능하다.
인가되는 전압의 양 및 Relay의 선정은 R.T.D의 특성에 의하여 얻을 수 있다.
※ 상기 3기종은 권선의 온도 상승에 대한 보호기능으로서는 모두 같은 기능을 하며 특히 THERMOSTAT 와 THERMISTOR의
동작원리는 더욱 유사하다. 다만 THERMOSTAT는 별도의 sequence 회로를 구성해야 하며, THERMISTOR는 Relay와의
조합으로 사용이 간편 하다. 사용장소에 대한 구분은 R.T.D는 충격 및 굴곡성에 매우 약하므로 저압 코일에서는 사용이 용이
하지 않으며 고압의 경우에는 권선의 층간에 취부하여 사용할 수 있다.
※ SPACE HEATER
옥외에 설치되는 개방형 고압전동기에 많이 설치되는 보호장치이다. 오랫동안 전동기를 운전하지 않을 때 습기가 차는 것을
방지하고, 전동기 운전 몇 시간 전에 히터를 가동하여 습기를 제거시키고 운전에 들어가면 된다. 전동기 운전중에는
HEATER 를 가동시켜서는 안 된다.
(1) SPACE HEATER의 표준 출력 및 전압
Fr NO. | 용량(W) | Fr NO. | 용량(W) | Fr NO. | 용량(W) | Fr NO. | 용량(W) | 전압(V) |
80~160 | 15~40 | 250 | 120 | 430 | 400 | 710 | 800 | 100~110
200~220 |
180 | 40 | 280 | 160 | 500 | 400 | 800 | 800 | |
200 | 60 | 330 | 200 | 560 | 600 | 900 | 1,000 | |
225 | 80 | 380 | 200 | 630 | 600 | 1,000 | 1,000 |
기동방식 항목 | 직입기동 | Y-Δ 기동 | 리액터 기동 | 기동보상기 기동 |
기동전류 | 전부하 전류의 5 ~ 8 배 | 직입기동전류 × 1/3 | 직입기동전류 × 리액터TAP(%) | 직입기동전류 × (보상기TAP(%))2 |
기 동 회전력(%) |
| 직입기동회전력× 1/3 | ( {리액터전압} over {직입기동전압} )^2 | ( {리액터전압} over {직입기동전압} )^2 |
기동 특성 | 1.기동회전력,전류가 크다. 2.기동시간이 짧다. 3.동시 충격이 큼. 4.기동입력이 커서수전설비 에 무리임 | 1.기동전류, 회전력이 작다 2.기동시 Y에서 Δ로 전환시 전동기 및 POWER에 충격이 크다. | 1.기동을 부드럽게 할 수 있다. 2.최대 회전력이 비교적 크다. 3.기동 회전력이 비교적 적다. | 1.기동전류가 비교적적다. 2.단권변압기 TAP 조정으로 기동전류 회전력을 완화 할 수있다. |
가격 비교 | 1 | 2 | 3 | 4 |
적용 부하 | 1.전원용량이 충분한 시설 에서 사용 2.범용 전동기 | 1.소용량으로 부하,무부하 기동시 2. MACHINE TOOL | 1.기동충격을 줄이는 경우 에 사용 2.펌프, 브로워 | 1.기동전류가 특히 적게 요구되는 경우에 사용 2.펌프, 브로워 |
* [기초지식]기동방식 참고
[Basic Edu.] --> [관련지식] --> E1.결선도 참고
전동기의 수명은 환경적인 영향에 따라서 크게 달라집니다. 예를 든다면 자동차와 같이 사용환경에 따라서 짧게는 몇년에서 길게는 수십년에 이르기까지(아직도 포니2가 운행하고 있지 않나요?) 한마디로 천차만별 입니다. 전동기도 이와 같이 사용환경에 따라 수명은 큰 차이를 보이게 됩니다. 따라서 전동기를 공급하는 업체측에서는 "정확히 몇년 사용하면 이 전동기는 교체하도록 하십시요" 라는 언급을 하기 힘든 상황이죠.
하지만 전동기의 수명을 좌우하는 여러 요인중에 가장 중요한 것은 전동기의 사용 온도, 더 자세히는 권선온도라 할 수 있습니다.. 권선온도가 10도 높아 질 때 일반적으로 전동기 내부권선의 절연수명은 1/2로 줄어들게 된다고 볼 수 있습니다. 권선절연이 파괴되면 전동기는 더 이상 사용할 수 없게 되므로 전동기의 수명과 절연물의 수명을 대충 유사하게 보는 것도 이러한 이유에서 입니다.
ASTM D1830 규격에서는 절연물이 F종 일때 최소 만족해야 할 수명을 아래와 같이 제시하고 있사오니 참고 하십시요.
Aging Temp
Hours Required for Class F
240 ℃
40
220 ℃
100
200 ℃
500
180 ℃
5000
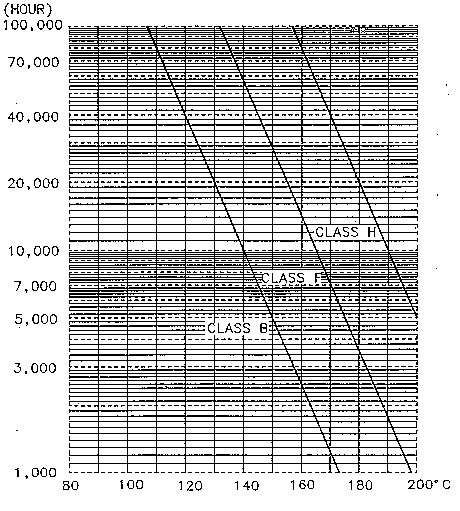
전동기에 사용하고 있는 각 절연등급의 사용온도에 따른 평균 예상 수명 곡선은 아래와 같이 나타납니다.(IEEE117& 101)
예를 들어서 F 종 절연일때 전동기의 권선온도가 130도 가까이 이르면 절연수명은 100,000 시간으로 전동기를 24시간 하루도 빠짐없이 연속운전 하게 되면 11년 5개월 이나 사용 하실 수 있습니다.
두번째로 고려 볼 수 있는 것은 전동기의 베어링입니다. 전동기의 베어링은 지속적인 유지보수가 필요한 품목이기도 합니다. Grease 충진식, oil 윤활 방식 모두 당사에서 제공하는 적절한 시기에 윤활유나 Grease 의 보충내지는 교체가 요구되는데, 적절한 유지보수가 이루진다면 통상 베어링은 수천시간 무리없이 사용가능합니다. 물론 베어링의 사용 부하 상태에 따라 큰 차이를 보이므로 일반적인 베어링 수명을 언급하기는 힘듭니다. 베어링 수명에 관한 지식은 베어링 공급업체의 카다로그에서 수식을 제공하고 있으며 당사에서도 소비자의 요구나 필요에 따라 이론적 수명을 제공해 주고 있습니다.
(1) %ED
The %ED is the cyclic duration factor, which is the ratio of the loaded period the the duration of the duty cycle, it's expressed in a percentage. The time for a duty cycle shall be 10 minutes and the cyclic duration factor to the duty-type motors shall be one of the following values;
15%, 25%, 40%, 60%
(2)시동빈도
시동빈도는 다음과 같이 규정한다.
부하시간율
15%
25%
40%
60%
100%
시동횟수 (회/시간)
54
90
144
216
360
상기에서 시동횟수는 정지에서 전속도까지의 횟수이다. 여기에 インチング 횟수와 전기제어 횟수가 고려되어져야 한다.
インチング횟수와 전기제어 횟수를 일율적으로 환산하기는 힘들다. 하지만 사용상 편의를 위해서 시동횟수는 전속도까지의 기동횟수에 インチング 횟수의 1/4배와 전기제어 횟수의 4/5배를 더해 주도록 한다.
(예) 전속도까지 기동회수 52회/시간 + インチング 104회/시간+전기제어 52회/시간
= 52 + 105*1/4 + 52 * 4/5 = 120
따라서 시동회수는 120회/시간
주) インチング 는 전속도까지가 올라가지 않는 일시적인 기동들임.
주) JEM 1202 Totally Enclosed Low Voltage Three Phase Wound Rotor Induction Motors For Crane Use를 참조함.
12가닥용(양전압 Y-D결선이 가능한 전동기) 결선을 6가닥(단전압 Y-D결선)으로 변경하는 방법
아래의 그림에서와 같이 12가닥의 리드선을 홍색으로 표시된 방법으로 묶어서 묶은 후의 그림대로 번호를 적용하여 사용하면 6가닥용으로 사용이 가능
1.220V용으로 결선하는 경우
2.440V용으로 결선하는 경우
신표기: 2000년 이후 변경 적용중인 표기방법 (IEC규격 적용)
구표기: 2000년 이전 표기 방법
- 효성중공업(주)
- 대표자(성명) : 우태희
- 주소 : 서울 마포구 마포대로 119 (공덕동), 효성[HYOSUNG] 빌딩
- 사업자 등록번호 : 578-87-00896
- 통신판매업 신고 : 2019-서울-1431호
- 고객센터 : 02-707-6428









